Replaced simple residual ratio test by an F-TestAs soon as level of significance raises above α>85%, RTK solution type will change to the fixed state. I updated the ratio check to reflect a minimum of statistical hypothesis testing, well-knowning that state of the art is a Generalized Integer Aperture Estimation for Partial GNSS Ambiguity Fixing […]
Kategorie: RTK-GNSS
Realtime kinematics global navigation satellite system
L2 Frequency Exploration
As mentioned earlier, a dual frequency GNSS receiver is a nice piece of hardware, but the surrounding equipment must also match. So if using Tallysman TW2712 antenna you will only be able to receive L1 frequency: Fortunately, I found a used Maxtenna M1227HCT-A2-SMA at low cost (45 €) on Ebay. As expected, the L2 frequency […]
Continuously Operated GNSS Reference Station B35OD
Nearly nine months ago I was fascinated by the possibility of high precision position measurements using the GNSS real time kinematics technique.However I struggled with the missing driver support for my ultra-low-cost-receiver. I took this as an opportunity to improve my C language coding skills and created my first GitHub repository by forking Tim Everetts […]
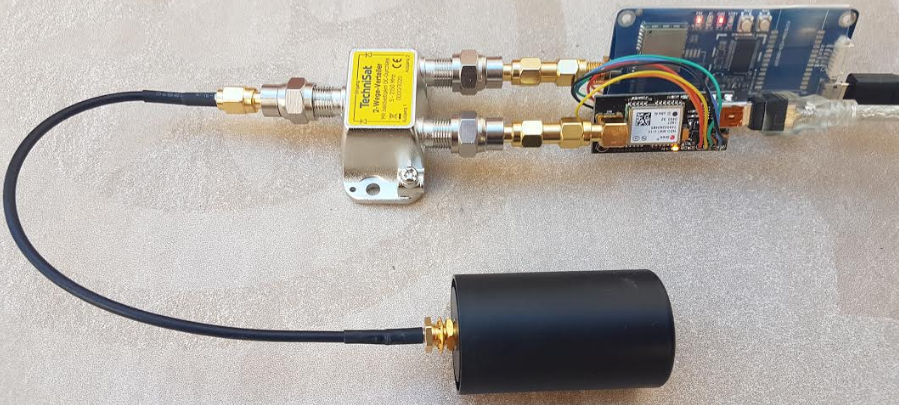
U-Blox M8T vs. Datagnss HD9310
Recently the price for the Allystar HD9310 based dual-frequency GNSS receiver dropped significantly. Compared to the well-known single-frequency U-Blox M8T receiver, the price difference is less than 50 $. Both of them are not available on the european market.In order to rule out an antenna-specific influence on the measurement results, both receivers should share one […]
Added SiRF-Support to RTKLIB
In my last post I wrote about the opportunities of GNSS receivers based on the low cost SiRFstar chipset in comparison to the well known and famous U-Blox chipset.It seemed hopeless to wait for Mr. Illarionov to update his six year old code base and also Mr. Everett seemed to have other priorities regarding his […]
